Синхронный и асинхронный двигатель: отличия, принцип работы, применение
Содержание:
- Теория работы
- Принцип действия [ править | править код ]
- Чем отличается синхронный двигатель от асинхронного
- Пуск синхронного двигателя
- АСИНХРОННЫЙ АЛЬТЕРНАТОР: ПЛЮСЫ
- строительство
- Статор асинхронного двигателя
- 7.3.1. Усройство и принцип действия синхронного электродвигателя.
- Плюсы и минусы синхронных альтернаторов
- Какой лучше
- Синхронный или асинхронный. Как выбрать двигатель?
- Что представляет собой синхронный двигатель?
- Операция
- Разновидности движков
Теория работы
Когда на двигатель подается питание переменного тока, полюса статора находятся под напряжением. Это, в свою очередь, притягивает полюса ротора, таким образом, полюса статора и ротора магнитно блокируются. Именно эта блокировка заставляет ротор вращаться с одинаковой синхронной скоростью с полюсами статора. Синхронная скорость вращения задается выражением Ns = 120f / P.
Когда нагрузка на двигатель постепенно увеличивается, ротор, несмотря на то, что он вращается с одинаковой скоростью, имеет тенденцию постепенно снижаться по фазе на некоторый угол, «β», называемый Угол нагрузки или Угол сцепления. Этот угол нагрузки зависит от величины нагрузки, на которую рассчитан двигатель. Другими словами, мы можем интерпретировать, как развиваемый двигателем крутящий момент зависит от угла нагрузки «β».
Электрическую работу синхронного двигателя можно сравнить с передачей мощности механическим валом. На рисунке показаны два шкива, «A» и «B». Предполагается, что шкив «A» и шкив «B» установлены на одном валу. «А» передает мощность от привода через вал, в свою очередь заставляя «В» вращаться, передавая мощность нагрузке.
Два шкива, которые прикреплены к одному валу, можно сравнить с блокировкой между полюсами статора и ротора.
Если нагрузка увеличивается, шкив «B» передает увеличение нагрузки на вал, что проявляется в скручивании вала.
Таким образом, поворот вала можно сравнить с ротором, падающим по фазе со статором.
Угол кручения можно сравнить с углом нагрузки «β». Также, когда нагрузка увеличивается, сила скручивания и угол закручивания увеличиваются. Таким образом, угол нагрузки «β» также увеличивается.
Если нагрузка на шкив «B» увеличивается до такой степени, что он заставляет вал крутиться и ломаться, то передача мощности через вал прекращается, когда вал ломается. Это можно сравнить с ротором, выходящим из синхронизма с полюсами статора.
Таким образом, синхронные двигатели могут работать либо с синхронной скоростью, либо они останавливаются.
Принцип действия [ править | править код ]
В основу работы подавляющего числа электрических машин положен принцип электромагнитной индукции. Электрическая машина состоит из неподвижной части — статора (для асинхронных и синхронных машин переменного тока) или индуктора (для машин постоянного тока) и подвижной части — ротора (для асинхронных и синхронных машин переменного тока) или якоря (для машин постоянного тока). В роли индуктора на маломощных двигателях постоянного тока очень часто используются постоянные магниты.
Ротор асинхронного двигателя может быть:
- короткозамкнутым;
- фазным (с обмоткой) — используются там, где необходимо уменьшить пусковой ток и регулировать частоту вращения асинхронного электродвигателя. В большинстве случаев это крановые электродвигатели серии МТН, которые повсеместно используются в крановых установках.
Якорь — это подвижная часть машин постоянного тока (двигателя или генератора) или же работающего по этому же принципу так называемого универсального двигателя (который используется в электроинструменте). По сути универсальный двигатель — это тот же двигатель постоянного тока (ДПТ) с последовательным возбуждением (обмотки якоря и индуктора включены последовательно). Отличие только в расчётах обмоток. На постоянном токе отсутствует реактивное (индуктивное или ёмкостное) сопротивление. Поэтому любая «болгарка», если из неё извлечь электронный блок, будет вполне работоспособна и на постоянном токе, но при меньшем напряжении сети.
Принцип действия трёхфазного асинхронного электродвигателя
При включении в сеть в статоре возникает круговое вращающееся магнитное поле, которое пронизывает короткозамкнутую обмотку ротора и наводит в ней ток индукции. Отсюда, следуя закону Ампера (на проводник с током, помещённый в магнитное поле, действует отклоняющая сила), ротор приходит во вращение. Частота вращения ротора зависит от частоты питающего напряжения и от числа пар магнитных полюсов.
Разность между частотой вращения магнитного поля статора и частотой вращения ротора характеризуется скольжением. Двигатель называется асинхронным, так как частота вращения магнитного поля статора не совпадает с частотой вращения ротора.
Синхронный двигатель имеет отличие в конструкции ротора. Ротор выполняется либо постоянным магнитом, либо электромагнитом, либо имеет в себе часть беличьей клетки (для запуска) и постоянные магниты или электромагниты. В синхронном двигателе частота вращения магнитного поля статора и частота вращения ротора совпадают. Для запуска используют вспомогательные асинхронные электродвигатели, либо ротор с короткозамкнутой обмоткой.
Асинхронные двигатели нашли широкое применение во всех отраслях техники. Особенно это касается простых по конструкции и прочных трёхфазных асинхронных двигателей с коротко-замкнутыми роторами, которые надёжнее и дешевле всех электрических двигателей и практически не требуют никакого ухода. Название «асинхронный» обусловлено тем, что в таком двигателе ротор вращается не синхронно со вращающимся полем статора. Там, где нет трёхфазной сети, асинхронный двигатель может включаться в сеть однофазного тока.
Статор асинхронного электродвигателя состоит, как и в синхронной машине, из пакета, набранного из лакированных листов электротехнической стали толщиной 0,5 мм, в пазах которого уложена обмотка. Три фазы обмотки статора асинхронного трёхфазного двигателя, пространственно смещённые на 120°, соединяются друг с другом звездой или треугольником.
На рисунке показана принципиальная схема двухполюсной машины — по четыре паза на каждую фазу. При питании обмоток статора от трёхфазной сети получается вращающееся поле, так как токи в фазах обмотки, которые смещены в пространстве на 120° друг относительно друга сдвинуты по фазе друг относительно друга на 120°.
Для синхронной частоты вращения nc поля электродвигателя с р парами полюсов справедливо при частоте тока f : n c = 60 f p =<60f>
>>
При частоте 50 Гц получаем для p = 1, 2, 3 (двух-, четырёх- и шести-полюсных машин) синхронные частоты вращения поля n c > = 3000, 1500 и 1000 об/мин.
Ротор асинхронного электродвигателя также состоит из листов электротехнической стали и может быть выполнен в виде короткозамкнутого ротора (с «беличьей клеткой») или ротора с контактными кольцами (фазный ротор).
Чем отличается синхронный двигатель от асинхронного
На сегодняшний день асинхронные электродвигатели более распространены, однако они не универсальны. В некоторых ситуациях их использование нельзя считать эффективным решением производственных задач. В таких ситуациях промышленное применение синхронных двигателей считается более оправданным. В чем же разница между синхронными и асинхронными двигателями?
Под электродвигателем в целом понимается электрическая машина, преобразующая электрическую энергию в механическую при помощи ротора. Такое устройство применяется в различных промышленных механизмах.
Ключевое отличие синхронного и асинхронного двигателей заключается в принципе работы. Синхронный двигатель состоит из ротора и стартера. На роторе имеется обмотка возбуждения, на которую подается постоянный ток. Таким образом, формируется магнитное поле ротора. На стартере, в свою очередь, также имеется обмотка, формирующая свое магнитное поле только уже посредством подачи переменного тока. Частота вращения ротора синхронна частоте подаче тока, отсюда и название двигателя. Характерной особенностью синхронного электродвигателя является способность поддерживать номинальные обороты вне зависимости от мощности нагрузки.
Асинхронный электродвигатель работает по иному принципу. На роторе такого механизма обмотка отсутствует. Вместо нее находятся соединенные стержни. Ротор такого плана называется «беличья клетка». Он не питается током, а полюса на нем индуцируются магнитным полем статора. Под влиянием механической нагрузки частота вращения рамки меньше частоты вращения магнита, то есть частоты не синхронны.
Следует учитывать, что отличить синхронный двигатель от асинхронного по внешним признакам невозможно. Статоры этих механизмов устроены одинаково. Кроме того, функция этих типов электродвигателей одна и та же — создание вращающегося магнитного поля статора. Единственное весомое отличие асинхронного и синхронного двигателей – устройство ротора.
Выбирая между синхронным и асинхронным электродвигателем необходимо отталкиваться от производственных задач. В случаях, когда для работы требуется поддержание постоянных оборотов при различных нагрузках предпочтительнее использовать синхронные двигатели. К примеру, в строительных кранах или гильотинных ножницах. Надо сказать, что асинхронные двигатели в промышленности распространены гораздо больше. Ими оснащены всевозможные станки, транспортеры, вентиляторы, насосы, словом, любое оборудование со стабильной нагрузкой. В их работе снижение оборотов при повышенной нагрузке не является критичным отклонением.
Важное отличие синхронных двигателей – дороговизна. Производство таких механизмов имеет более высокую стоимость, поэтому приобретение и дальнейшее обслуживание также потребует больших вложений
Выводы:
- Асинхронный и синхронный двигатели отличаются принципом работы.
- В синхронном двигателе частота вращения ротора соответствует частоте подаче тока.
- Синхронный двигатель может поддерживать номинальные обороты при любой нагрузке, асинхронный – нет.
- Асинхронные двигатели в промышленности распространены гораздо больше, чем синхронные.
- Синхронные двигатели дороже, чем асинхронные.
Пуск синхронного двигателя
Одним
из главных недостатков синхронных
двигателей является сложность их пуска
в ход. Пуск синхронных двигателей может
быть осуществлен при помощи вспомогательного
пускового двигателя или путем асинхронного
пуска.
Пуск
синхронного двигателя при помощи
вспомогательного двигателя. Если ротор
синхронного двигателя с возбужденными
полюсами развернуть другим, вспомогательным
двигателем до скорости вращения поля
статора, то магнитные полюсы статора,
взаимодействуя с полюсами ротора,
заставят ротор вращаться далее
самостоятельно без посторонней помощи,
в такт с полем статора, т. е. синхронно
(откуда эти двигатели и получили свое
название).
Для
осуществления пуска необходимо, чтобы
число пар полюсов асинхронного двигателя
было меньше числа пар полюсов синхронного
двигателя, ибо при этих условиях
вспомогательный асинхронный двигатель
может развернуть ротор синхронного
двигателя до синхронной скорости.
Порядок
пуска синхронного двигателя следующий.
Включая рубильник 3, пускают вспомогательный
асинхронный двигатель 2, который
разворачивает ротор синхронного
двигателя 1 до скорости, соответствующей
скорости поля статора. Скорость вращения
вспомогательного двигателя определяется
по тахометру1. Затем, включая рубильник
4 постоянного тока, возбуждают полюсы
ротора. Чтобы включить синхронный
двигатель в сеть трехфазного тока, его
нужно синхронизировать так же, как и
при включении синхронного генератора
на параллельную работу. Для этого
реостатом 5 устанавливают такое
возбуждение, чтобы напряжение обмотки
статора по вольтметру V было равно
напряжению сети, указываемому вольтметром
V1.
Электролампы
6, включенные параллельно ножам рубильника
7 трех-фазной сети, при разомкнутом
рубильнике будут мигать. Сначала мигание
будет частым, но если изменять скорость
вращения вспомогательного асинхронного
двигателя, то лампы будут мигать . все
реже и реже. Синхронный двигатель можно
включить в сеть трехфазного тока
рубильником 7 тогда, когда все три лампы
одновременно погаснут. Ротор двигателя
при этом входит в синхронизм и может
далее вращаться самостоятельно. Теперь
вспомогательный двигатель 2 рубильником
3 можно отключить от сети.
Сложность
пуска и необходимость вспомогательного
двигателя являются существенными
недостатками этого способа пуска
синхронных двигателей. Поэтому в
настоящее время он применяется редко.
Асинхронный
пуск синхронного двигателя. Для
осуществления этого способа пуска в
полюсных наконечниках полюсов ротора
укладывается дополнительная
короткозамкнутая обмотка. Так как во
время пуска в обмотке возбуждения 1
двигателя наводится большая э. д. с, то
по соображениям безопасности она
замыкается рубильником 2 на сопротивление
3
При
включении напряжения трехфазной сети
в обмотку статора 4 синхронного двигателя
возникает вращающееся магнитное поле,
которое, пересекая короткозамкнутую
(пусковую) обмотку, заложенную в полюсных
наконечниках ротора, индуктирует в ней
токи.
Эти
токи, взаимодействуя с вращающимся
полем статора, приведут ротор во вращение.
При достижении ротором наибольшего
числа оборотов (95—97% синхронной скорости)
рубильник 2 переключают так, чтобы
обмотку ротора включить в сеть постоянного
напряжения.
Недостатком
асинхронного пуска является большой
пусковой ток (в 5—7 раз больший рабочего
тока). Пусковой ток вызывает падение
напряжения в сети, а это отражается на
работе других потребителей. Для уменьшения
пускового тока применяют пуск при
пониженном напряжении с помощью реактора
2 или автотрансформатора.
В
настоящее время применяют почти
исключительно асинхронный пуск синхронных
двигателей ввиду его простоты и
надежности. Существуют также схемы
автоматического асинхронного пуска
синхронных двигателей
АСИНХРОННЫЙ АЛЬТЕРНАТОР: ПЛЮСЫ
Бесщеточный альтернатор не имеет обмотки на подвижной части, да и сама подвижная часть смахивает на маховик. Таким образом, и в щетках нет необходимости. Для работы генератору достаточно магнитного поля и конденсаторов. Технически конструкция у асинхронного альтернатора проще, а значит, долговечнее и надежнее, техническое обслуживание (замена щеток) вообще отсутствует. Обмотки медной нет, перегрева быть не может и охлаждение не требуется. Конструкция бесщеточного генератора такова, что пыль, влага и грязь не затягиваются вовнутрь. Благодаря этому повышается класс защиты. Бесщеточные генераторы обладают самым высоким уровнем защиты. Защищены от струй воды, падающих под любым углом, проникновения мелких пылинок и касаний. Вес и размеры асинхронного генератора намного меньше, ведь у него нет медной обмотки и вентилятора для охлаждения. То есть, получаем такие плюсы отсутствия щеток и обмотки:
Хорошая защита от пыли и грязи.
Небольшой вес и размеры.
Низкая цена.
Не нужно менять щетки.
И самый главный плюс — бесщеточный альтернатор невосприимчив к коротким замыканиям, что особенно важно при подключении к электростанции сварочных аппаратов.
строительство
Ротор большого водяного насоса. Контактные кольца можно увидеть под барабаном ротора.
Обмотка статора большого водяного насоса
Основными компонентами синхронного двигателя являются статор и ротор. Статор синхронного двигателя и статор асинхронного двигателя аналогичны по конструкции. При синхронной ране ротор машина двойного питания как исключение, рама статора содержит обертку пластины . К пластине оболочки прикреплены окружные ребра и планки . Чтобы выдержать вес машины, необходимы рамы и опоры . Когда обмотка возбуждения возбуждается постоянным током , требуются щетки и контактные кольца для подключения к источнику возбуждения. Обмотка возбуждения также может возбуждаться бесщеточным возбудителем. Цилиндрические круглые роторы (также известные как ротор с невыпадающими полюсами) используются до шести полюсов. В некоторых машинах или когда необходимо большое количество полюсов, используется ротор с явными полюсами. Конструкция синхронного двигателя аналогична конструкции синхронного генератора переменного тока . В большинстве конструкций синхронных двигателей используются стационарный якорь и вращающаяся обмотка возбуждения. Этот тип конструкции является преимуществом по сравнению с двигателем постоянного тока, в котором используется якорь вращающегося типа.
Статор асинхронного двигателя
Статор асинхронного двигателя представляет из себя сердечник, состоящий из пластин электротехнической стали и содержащий в себе медные обмотки, которые определенным образом уложены в пазах статора.
Как было упомянуто, сердечник статора состоит из пластин, которые изолированы друг от друга. С внутренней стороны статора есть пазы
в которые укладывается изоляция
Далее в эти пазы наматывается медный лакированный провод определенным образом, который представляет из себя обмотки статора
Асинхронный двигатель имеет три “куска” медного провода
Которые определенным образом уложены в пазы статора под углом в 120 градусов друг относительно друга.
Все 6 концов обмоточных проводов выведены в клеммную коробку, которая находится на корпусе двигателя.
Статор двигателя, а точнее, размеры сердечника, количество катушек в каждой обмотке и толщина моточного провода из которого намотаны катушки определяют основные параметры двигателя. Например, от числа катушек в каждой обмотке зависит номинальное число оборотов двигателя, а от толщины провода, которым они намотаны, зависит номинальная мощность двигателя. Количество обмоток для трехфазного асинхронного двигателя всегда равно трем. А вот количество катушек в каждой из этих обмоток разное. Катушки могут наматывать в один или два провода. Учитывая, что номинальное число оборотов двигателя обратно пропорционально номинальной нагрузке, можно смело сказать, что скорость вращения вала асинхронного двигателя будет уменьшаться при увеличении нагрузки. Если при работе двигателя начнут уменьшаться его обороты из-за роста нагрузки, то не остановка этого процесса может привести к полной остановке двигателя. Двигатель начнет сильно гудеть, вал ротора не будет крутиться – возникнет сильный нагрев катушек, с последующим разрушением изоляции моточного провода, что приведет к короткому замыканию и возгоранию обмоток.
Реальное фото статора одного из асинхронного двигателя выглядит вот так.
7.3.1. Усройство и принцип действия синхронного электродвигателя.
Характерный признак синхронного
двигателя – вращение ротора с
синхронной частотой n1
=
ƒ160
/pнезависимо от нагрузки на валу. Поэтому
синхронные двигатели используют в
системах автоматики для привода
механизмов, требующих строго стабильной
частоты вращения.
Синхронный двигатель, как и асинхронный,
состоит из неподвижного статора и
вращающегося ротора, разделенных
воздушным зазором (у синхронных двигателей
этот зазор несколько больше). Существуют
конструктивные разновидности исполнения
синхронных двигателей малой мощности,
отличающиеся в основном устройством
ротора: явнополюсные с электромагнитным
возбуждением, явнополюсные с возбуждением
постоянными магнитами, явнополюсные
реактивные (с невозбужден-ным ротором),
неявнополюсные гистерезисные.
Рассмотрим синхронные явнополюсные
двигатели с
электромагнитным возбуждением.
Эти двигатели изготавливаются обычно
мощностью в несколько киловатт и более
и поэтому в устройствах автоматики
широкого применения не получили.
Однако основные положения теории этих
двигателей используются при изучении
синхронных двигателей малой мощности
с возбуждением постоянными магнитами
и других типов.
Для изучения принципа действия синхронного
явнополюсного двигателя с электромагнитным
возбуждением используем модель,
представляющую собой две разделенные
воздушным зазором магнитные системы
с явно выраженными полюсами – внешнюю
1и внутреннюю
2(рис.
6). Если внешняя система полюсов неподвижна,
то благодаря силам магнитного притяжения
внутренняя система полюсов (ротор)
расположится так, что ее полюсы будут
находиться под полюсами внешней системы
противоположной полярности. При этом
силы
FMмагнитного притяжения, действу-ющие
на внутреннюю систему, не будут
создавать электромагнитного момента
(рис. 7,а), так как они направлены
радиально (по оси полюсов).
Если внешнюю систему полюсов вращать
с небольшой частотой n1, то в
начальный момент времени эта система
сместится относительно внутренней
на некоторый угол θ (рис. 7,б). При
этом вектор силы магнитного притяженияFMтакже повернется относительно оси
полюса ротора. Теперь эта сила состоит
из двух составляющих:FM=
Fn
+ Ft
причем нормальная составляющая
Fnнаправлена по оси полюса рото-
— 4 —
ра,
а тангенциальная
Ft–
перпендикулярно оси полюса. Совокупность
составляющих
Ftдействующих
на все полюсы ротора, создает на роторе
электромагнитный вращающий моментМ,
приводящий ротор во вращение с
синхронной частотойn1, т. е.
синхронно вращению внешней системе
полюсов.
Рис.
6. Упрощенная модель синхронного
двигателя:
Рис. 7. Возникновение
электромагнитного
а
– внешняя магнитная система;
момента на роторе синхронного
б
– внутренняя магнитная система.
двигателя.
Трехфазный синхронный двигатель
отличается от рассмотренной модели
тем, что в нем вместо внешней системы
полюсов имеется неявнополюсный
статор с распределенной трехфазной
обмоткой, аналогичный статору
асинхронного трехфазного двигателя.
Ротор синхронного двигателя – явнополюсной
конструкции с электромагнитным
возбуждением. При этом на полюсах ротора
2 располагают
полюсные
катушки
3(рис. 8), которые при последовательном
соединении образуют обмотку возбуждения
(ОВ).
При подключении ОВ к источнику постоянного
тока возникает магнитный поток возбуждения
ФВ, силовые линии которого
сцеплены с обмоткой статора1.
При включении обмотки статора в
трехфазную сеть создается вращающееся
с синхронной частотойn1магнитное поле с таким же числом
полюсов, как на роторе. Благодаря
взаимодействию полей статора и ротора
возникает электромагнитный момент,
вращающий ротор ссин-хронной
частотой. В результате электрическая
энергия сети преобразуется в механическую
энергию вращения.
Предположим, что ротор двигателя враща-
Рис.
8.
Магнитная система явнополюсногоется с частотой, отличающейся
от частоты
синхронного
двигателя (2р
= 4): вращения
поля статора, тогда в некоторые
1
– обмотка статора; 2
– полюса ротора; моменты
времени возбужденные полюса ро-
3
– полюсные катушки. тора
окажутся под одноименными полюсами
поля статора, возникнут силы магнитного
от-
— 5 —
талкивания
Суммарный электромагнитный момент
станет равным нулю и ротор остановится.
На рис. 9,
апоказана конструкция ротора синхронного
двигателя с явно выраженными полюсами.
Плюсы и минусы синхронных альтернаторов
Качественные СА должны комплектоваться медной, а не слабой алюминиевой обмоткой (будьте внимательны: некоторые производители таким образом пытаются снизить расходы на производство). Именно качественная обмотка и щеточный механизм обеспечивают равномерность тока на выходе (с отклонением не более 5 %), позволяют легко переносить повышенные нагрузки при запуске и непродолжительные колебания напряжения.
Чистый электроток очень важен для таких высокочувствительных пользователей, как ноутбуки, компьютеры, принтеры, телефоны, лабораторное и медицинское оборудование. И даже для такой привычной бытовой техники, как холодильники, ТВ, стиральные машинки также предпочтительным будет электроток, вырабатываемый синхронным генератором. Кроме того, только к щеточным ИБП можно подключать АВР (автоматический ввод резерва).
Итак, к неоспоримым плюсам щеточного узла и медной обмотки СА отнесем:
- стабильность напряжения;
- качественный электроток;
- надежность в работе.
При этом постоянное движение щеток способствует чрезмерному нагреву генератора. Применяющаяся в СА воздушная система охлаждения с вентилятором в целом достаточно надежна, но имеет существенный недостаток – эффект пылесоса. Активное втягивание вовнутрь пыли, грязи, влаги часто становится причиной неполадок в системе.
Но прогресс не стоит на месте, и сегодня ведущие производители находят все новые способы защиты оборудования от внешних факторов.
Выбирая генератор, обязательно интересуйтесь, к какому классу защиты он относится.
Минусы щеточных альтернаторов:
- попадание пыли и влаги;
- необходимость периодического техосмотра и замены щеток;
- высокая стоимость;
- создание помех для радиоволн.
Какой лучше
Итак, в статье были разобраны устройство и принцип действия двух видов электродвигателей. Говорить о том, что какой-то из них лучше, нельзя. Но отметим, что асинхронные модели проще в конструктивном аспекте. Они надежнее в эксплуатации. Если их не перегружать, то срок службы может быть очень длительным. К сожалению, синхронные виды этим похвастаться не могут. Графитовые щетки быстро изнашиваются, им требуется замена. Но если не уследить, и графит сотрется полностью, то металлические держатели щеток начнут истирать токосъемное кольцо. А его выход из строя – это не только полный выход из строя двигателя, это большое количество искр (трение металла о металл) и возможность появления более серьезных неприятностей.
Синхронный или асинхронный. Как выбрать двигатель?
История электромоторов составляет более 170 лет, однако наибольшее их развитие можно наблюдать за последние десять или около того лет. Появление электронных систем управления, позволяющих регулировать скорость и крутящий момент, и, следовательно, различные типы преобразователей частоты и системы плавного пуска произвели революцию на рынке для использования таких электроприводов.
В настоящее время электродвигатели используются не только для управления различными типами машин, но и в современных системах автоматизации. Двигатель, взаимодействующий с преобразователем частоты или сервоприводами используется в конвейерах, системах позиционирования, а также в приложениях, включая многоосевые приложения, которые требуют точных, быстрых и синхронизированных перемещений.
ПРИВОДНАЯ ТЕХНИКА В АВТОМАТИЗАЦИИ
Приводная техника, используемая в широко понятных системах автоматизации, охватывает довольно большую группу устройств.
Существуют не только двигатели постоянного тока, синхронные двигатели переменного тока, асинхронные двигатели, частотные преобразователи, но также сервоприводы, моторедукторы и другие механические элементы, которые позволяют регулировать скорость и крутящий момент двигателя.
Наиболее часто используемыми в автоматизации являются двигатели и низковольтные приводы мощностью от 1 киловатта до не более нескольких десятков, а иногда и нескольких сотен. Двигатели с системами рекуперации энергии становятся все более популярными в мире. Это связано не только с необходимостью использования высокопроизводительных устройств, но и с правилами регулирования потребления и энергии, которые становятся все более жесткими во многих странах.
Небольшие двигатели переменного тока, предлагаемые Украинскими поставщиками, являются синхронными и асинхронными двигателями. Универсальные двигатели, которые могут работать как с постоянной, так и с переменной мощностью постоянного тока, гораздо менее популярны среди украинских потребителей. Как уже упоминалось, наиболее продаваемыми являются двигатели мощностью от 1 Вт до 5 кВт, а также устройства мощностью от 5 Вт до 10 кВт.
Стоит отметить, что в Украине наиболее популярными сейчас являются асинхронные двигатели, которые могут быть легко использованы во всех видах систем привода, где не требуется точное управление двигателем. Асинхронные электродвигатели купить украина от мировых лидеров SIEMENS, ABB, FESTO, Phoenix Contact можно на сайте /simat.com.ua/
В случае сервоприводов пользователи обращают внимание на динамику привода и точность движения. Также важны такие параметры, как эффективность двигателя, что существенно влияет на общую стоимость поддержания системы автоматизации в данной компании
Современные электродвигатели характеризуются простой конфигурацией и простотой эксплуатации. Инженеры делают упор на повышение их эффективности и улучшение рабочих параметров, а также на их автоматическую адаптацию к изменяющимся условиям нагрузки.
Проэкологическое строительство двигателя и низкое потребление энергии также становятся все более и более важными. Электродвигатели систематически подвергаются миниатюризации. К сожалению, после уменьшения размеров двигателей, нет снижения мощности, но увеличивается их грузоподъемность
Принимая во внимание контроль, наблюдается тенденция к цифровизации электродвигателей. Существует все больше доступных протоколов и коммуникационных технологий, которые основаны главным образом на промышленном Ethernet
— Асинхронные двигатели используются для привода приводов, но у них есть конкретные области применения.
Асинхронные двигатели используются в приложениях с меньшим технологическим зацеплением, но там, где момент инерции привода значителен. Такие применения представляют собой плоские роликовые конвейеры или, насосы, вентиляторы, лифты, — говорит Конрад Флорчик, инженер-программист SEW-EURODRIVE Polska.
Что представляет собой синхронный двигатель?
К синхронным принято относить электродвигатели, которые функционируют на переменном токе и имеют ротор с частотой вращения, совпадающей с частотой оборотов магнитного поля в конструкции агрегата.
Ключевые элементы синхронного электродвигателя:
Первый элемент агрегата располагается на статоре. Индуктор размещается на роторе, который отделен от статора воздушной прослойкой. Структура якоря представлена обмоткой (одной или несколькими). Токи, которые подаются в соответствующий элемент двигателя, формируют магнитное поле, вращающееся с заданной частотой и взаимодействующее с полем индуктора. Индуктор включает 2 полюса — в виде постоянных магнитов.
Синхронный агрегат может функционировать в двух режимах:
- как собственно электродвигатель;
- как генератор.
Первый режим работы предполагает взаимодействие магнитного поля, формирующегося на якоре, и поля, которое образуется на полюсах индуктора. Синхронный двигатель в режиме генератора функционирует за счет электромагнитной индукции: в процессе вращения ротора магнитное поле, которое формируется на обмотке, по очереди взаимодействует с фазами обмотки на статоре, вследствие чего образуется электродвижущая сила.
Операция
Вращающееся магнитное поле образуется из суммы векторов магнитного поля трех фаз обмоток статора.
Работа синхронного двигателя происходит за счет взаимодействия магнитных полей статора и ротора. Обмотка статора, состоящая из трехфазной обмотки, имеет трехфазное питание, а ротор — источник постоянного тока. Трехфазная обмотка статора, по которой проходят трехфазные токи, создает трехфазный вращающийся магнитный поток (и, следовательно, вращающееся магнитное поле). Ротор блокируется вращающимся магнитным полем и вращается вместе с ним. Когда поле ротора синхронизируется с вращающимся магнитным полем, говорят, что двигатель синхронизирован. Однофазная (или двухфазная, полученная из однофазной) обмотка статора возможна, но в этом случае направление вращения не определено, и машина может запускаться в любом направлении, если это не предотвращается пусковыми устройствами.
Когда двигатель работает, скорость двигателя зависит только от частоты питания. Когда нагрузка двигателя превышает предельную нагрузку, двигатель теряет синхронизацию, и обмотка возбуждения больше не следует вращающемуся магнитному полю. Поскольку двигатель не может создавать (синхронный) крутящий момент, если он выходит из синхронизации, на практике синхронные двигатели имеют частичную или полную обмотку с короткозамкнутым ротором (амортизатор) для стабилизации работы и облегчения запуска. Поскольку эта обмотка меньше, чем у эквивалентного асинхронного двигателя и может перегреваться при длительной работе, а также из-за того, что в обмотке возбуждения ротора индуцируются большие напряжения с частотой скольжения, устройства защиты синхронного двигателя обнаруживают это состояние и прерывают подачу питания (не в такт защита).
Разновидности движков
Конструкция ротора и принцип действия синхронной машины-двигателя напрямую связана
- с мощностью, которую надо создать на его вале,
- необходимой для этого величиной магнитного потока,
- параметрами напряжения питания статора.
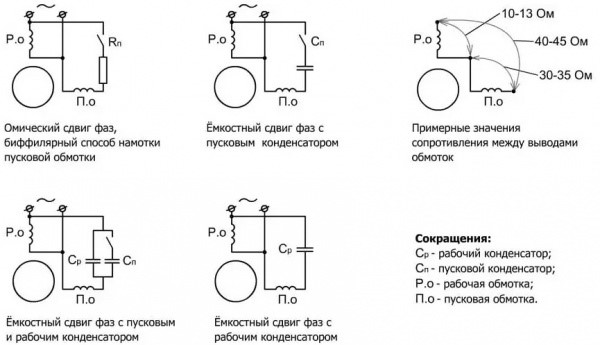
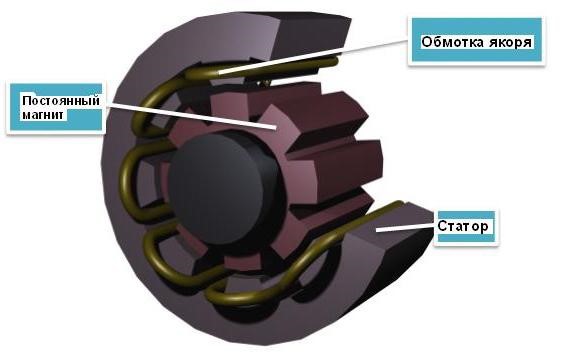
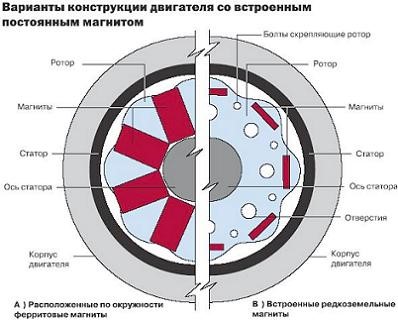
Устройство синхронных машин небольшой мощности получается более простым при изготовлении магнитного ротора из специальных материалов. Так же применяется явно полюсный ротор с малой начальной намагниченностью. В результате получаются конструкции с постоянными магнитами, а также гистерезисные и синхронные реактивные двигатели. На статор этих движков подается переменное напряжение. Число фаз и частота соответствуют конструкции двигателя. В однофазных движках может быть использован конденсатор, через который подключается одна из двух обмоток статора. Но может быть применена схема из показанных далее вариантов.




Гистерезисный движок похож на синхронный реактивный двигатель. Эти синхронные машины переменного тока характеризует одинаковый принцип действия. Его определяет магнитное поле статора, намагничивающее ротор. Гистерезисный движок и синхронный реактивный электродвигатель своей надежностью не уступают асинхронным двигателям. Однако роторы этих синхронных машин всегда бывают существенно дороже роторов асинхронных движков.
С целью получения максимального силового взаимодействия и больших по величине крутящих моментов в роторе используется принцип электромагнита. При этом его называют индуктором с обмоткой возбуждения. Для ее питания применяется постоянное напряжение, которое подается на щетки. Они расположены на статоре и скользят по кольцам, установленным на роторе. Через эту пару скользящих контактов течет постоянный ток возбуждения.

Такое классическое устройство синхронной машины существует и в наши дни, но преимущественно в наиболее мощных моделях. Для запуска движков обычно используются конструктивные решения со скольжением магнитных полей, характерные для асинхронных двигателей. При наличии индуктора для этого достаточно накоротко замкнуть щетки. В синхронных электрических машинах движки без щеток в роторе делаются с пусковыми обмотками типа беличьей клетки. Могут быть иные конструктивные решения для асинхронного старта.
Важной особенностью рассматриваемых двигателей, питаемых переменным напряжением, является их польза при работе без механической нагрузки или при ее небольшой величине. В таком режиме работы при небольшом возбуждении реактивная мощность из сети потребляется, а при значительном — отдается в сеть
Тем самым увеличивается эффективность электроснабжения. Для этой цели делаются специальные движки, называемые синхронными компенсаторами.

Развитие полупроводниковых приборов позволило создавать вращающееся магнитное поле путем преобразования постоянного напряжения. Очевидно то, что такое техническое решение расширило возможности управления электрическими двигателями. Регулирование частоты питающего напряжения и бесконтактный индуктор — это главные достижения полупроводниковых моделей. Но при этом существуют ограничения, определяемые возможностями электронных ключей.
По этой причине наиболее мощные из всех существующих движков по-прежнему являются трехфазными индукторными конструкциями со щетками и кольцами.