Принцип работы и диагностика can-шины в автомобиле
Содержание:
3 Кан-интерфейс и диагностика системы
Системы управления CAN имеют не только различное нагрузочное сопротивление, но и разную скорость передачи сообщений. Этот факт усложняет обработку однотипных сообщений внутри бортовой сети. Для упрощения диагностики на современных автомобилях используется межсетевой интерфейс (преобразователь сопротивления), который либо выполнен в качестве отдельного управляющего блока, либо встроен в ЭБУ двигателя автомобиля.
ЭБУ двигателя с межсетевым интерфейсом
Подобный преобразователь также предназначен для ввода или вывода определенной диагностической информации по проводу «К»-линия, который подключается во время диагностики или изменения параметров работы сети либо в диагностический разъем либо непосредственно к преобразователю.
https://youtube.com/watch?v=m7dxr8ClEUQ
Таким образом, при проведении диагностических работ своими руками используется унифицированный разъем типа OBD1 или OBD2, который можно встретить на большинстве современных иномарок и отечественных автомобилей. Однако, некоторые модели автомобилей, например Volkswagen Golf 5V, Audi S4, не имеют межсетевого интерфейса. Кроме того, схема блоков управления и CAN-шины индивидуальна для каждой марки и модели авто. Для того, чтобы провести диагностику CAN-системы своими руками, используется специальная аппаратура, которая состоит из осциллографа, анализатора CAN и цифрового мультиметра.
Работы по выявлению неисправностей начинаются со снятия напряжения сети (снятие минусовой клеммы АКБ). Далее определяется изменение сопротивления между проводами шины. Самыми распространенными видами неисправности Кан-шины в автомобиле является замыкание или обрыв линии, выход из строя резисторов нагрузки и снижение уровня передачи сообщений между элементами сети. В некоторых случаях без применения анализатора Can выявить неисправность не получается.
История появления CAN шины
Разработка CAN-шины началась в 1983 году в компании Robert Bosch GmbH . Протокол был официально опубликован в 1986 году на конференции Ассоциации автомобильных инженеров (SAE) в Детройте , штат Мичиган . Первые чипы CAN-контроллеров, выпускаемые Intel и Philips , вышли на рынок в 1987 году. Выпущенный в 1991 году Mercedes-Benz W140 был первым серийным автомобилем с системой мультиплексирования на базе CAN. Bosch опубликовала несколько версий спецификации CAN, и последняя от этой компании — CAN 2.0, вышла в 1991 году. В 1993 году Международная организация по стандартизации (ISO) выпустила стандарт CAN стандарта ISO 11898, который позднее был реорганизован на две части; ISO 11898-1, который охватывает уровень канала передачи данных , и ISO 11898-2, который охватывает физический уровень CAN для высокоскоростной CAN. ISO 11898-3 был выпущен позднее и охватывает физический уровень CAN для низкоскоростной отказоустойчивой CAN. Стандарты физического уровня ISO 11898-2 и ISO 11898-3 не являются частью спецификации Bosch CAN 2.0. Однако Bosch все еще не отступил от стандарта CAN. В 2012 году Bosch выпустила CAN FD 1.0 или CAN с гибкой скоростью передачи данных. Эта спецификация использует другой формат, который позволяет различную длину данных, а также, при необходимости, переключиться на более быструю скорость передач. CAN FD совместим с существующими сетями CAN 2.0, поэтому новые устройства CAN FD могут сосуществовать в одной сети с существующими CAN-устройствами.
Арбитраж и сигналы на шине CAN
CAN – это протокол CSMA/CD, означающий, что каждый узел на шине может обнаруживать коллизии и откатываться на определенное время перед попыткой повторной передачи. Это обнаружение коллизий достигается посредством арбитража приоритетов на основе идентификаторов сообщений. Прежде чем обсудить арбитраж, давайте подробнее рассмотрим доминантные и рецессивные биты, используемые на шине CAN.
Интересным аспектом шины CAN является то, что она использует инвертированную форму логики с двумя состояниями: доминантным и рецессивным. На рисунке ниже показана упрощенная версия вывода и ввода CAN-трансивера. Поток битов ‘101’ поступает с / идет на CAN-контроллер и / или микроконтроллер
Обратите внимание, что когда контроллер отправляет поток битов, они дополняются и помещаются в линию CANH. Линия CANL всегда является дополнением CANH
Чтобы арбитраж работал, устройство CAN должно отслеживать как то, что оно отправляет, так и то, что в данный момент находится на шине, то есть то, что оно получает.
На следующем рисунке показаны сигналы CANH и CANL одновременно, так что вы можете видеть шину CAN в действии. Под сигналами шины изображено дифференциальное напряжение, которое соответствует доминантному и рецессивному состояниям сигналов CAN. Первые три сегмента во времени, t1 – t3, нарисованы так, чтобы соответствовать трем битам, показанным на предыдущем рисунке. Мы рассмотрим это с точки зрения драйвера вывода. Ввод драйвера изначально видит «1» и дополняет его до нуля, который помещается в CANH. CANL видит дополнение CANH и переводится в высокое логическое состояние. Это показано как t1 на рисунке
Обратите внимание, что напряжения CANH и CANL смещены относительно друг друга. В течение времени t1 дифференциал CANH — CANL очень близок к нулю, так как CANH и CANL имеют почти одинаковое напряжение
Этот период, когда драйвер посылает логику «1», в результате чего CANH и CANL близки к одному и тому же напряжению, мы называем рецессивным состоянием CAN.
Следующий отправленный бит – «0». CANH получает свое дополнение, и CANL снова получает дополнение CANH
Обратите внимание, что на этот раз напряжения CANH и CANL не близки друг к другу. Следовательно, дифференциальное напряжение (VDIFF) больше
Это CAN-доминантное состояние. Мы говорим, что логика инвертирована, потому что «1» приводит к понижению логического уровня шины, а «0» — к повышению. Входной приемник работает аналогично.
Как упоминалось ранее, чем меньше 11-битный идентификатор, тем выше приоритет сообщения. Каждый бит, который передает узел, он контролирует. Таким образом, узел обнаруживает, что сообщение с более высоким приоритетом размещается на шине. В тот момент, когда узел отправляет рецессивный бит, но обнаруживает доминантный бит на шине, он «отступает». Это называется неразрушающим арбитражем, потому что «победившее» сообщение продолжает передаваться без каких-либо проблем
Обратите внимание, что рецессивная логика «1» проигрывает доминантной логике «0». Это имеет смысл, поскольку более низкое значение идентификатора представляет более высокий приоритет
Чтобы лучше понять, что это значит, взгляните на следующий рисунок, на котором показаны три узла на шине CAN, пытающиеся получить контроль
Важно помнить, что каждый раз, когда отображается рецессивный бит, контроллер отправляет «1», в то время как доминантные биты соответствуют отправке «0»
Узлы 1–3 все посылают поток битов. Этот поток битов представляет идентификаторы сообщений и их приоритет. Для начала все три узла отправляют «1», который представлен на шине CAN как рецессивный бит. Затем каждый узел отправляет «0» или доминанатный бит. Третий бит, помещенный в шину – это еще один бит «1» или рецессивный бит. На этом этапе ни один из узлов не обнаружил никакого конфликта с другим узлом на шине, поэтому они продолжают передавать.
Для четвертого бита узел 1 отправляет «0» или доминантный бит. Узел 2 передает рецессивный бит, но обнаруживает доминантный бит на шине. Он немедленно «отступает», зная, что в данный момент отправляется сообщение с более высоким приоритетом. Узел 3 продолжает передачу, поскольку он считывает тот же доминантный бит, который он передал. Когда пятый бит помещается в шину, узел 3 затем распознает, что он имеет более низкий приоритет, и прекращает передачу. И узел 2, и узел 3 ждут определенное количество времени, прежде чем пытаться снова. Это показано в правой части рисунка, где выиграл арбитраж узел 3. Как видите, логический бит «0», соответствующий младшему идентификатору сообщения, позволяет проводить арбитраж.
Технология iCAN
Рассматривая шины транспортного средства, следует уделить внимание программе блокировки работы двигателя. Для этого разработан обмен данными посредством шины CAN, iCAN-модулем
Он подключается к цифровой шине и отвечает за соответствующую команду
Для этого разработан обмен данными посредством шины CAN, iCAN-модулем. Он подключается к цифровой шине и отвечает за соответствующую команду.
Имеет небольшие габариты и присоединяется к любому отделению шины. При старте движения автомобиля iCAN посылает команду соответствующим блокам, и мотор глохнет. Преимуществом данной программы является отсутствие разрыва сигнала. Существует инструктирование электронного блока, после этого сообщение отключает функционирование соответствующих исполнительных элементов.
Этот тип блокировки характеризуется наивысшей скрытностью, а потому и надежностью. При этом ошибки не записываются в память ЭБУ. CAN-шина предоставляет всю информацию о скорости, движении автомобиля данному модулю.
Разновидности CAN
В настоящее время доступны различные устройства с CAN-интерфейсом, которые помимо передачи данных из одной точки в другую позволяют реализовать синхронизацию процессов и обслуживание по приоритетам. Более ранние реализации CAN-контроллеров используют кадры с 11-разрядным идентификатором и возможностью адресации до 2048 сообщений и соответствуют спецификации CAN V. 2.0A. Такие контроллеры носят название Basic CAN и характеризуются сильной загруженностью центрального процессора (ЦПУ), так как каждое входящее сообщение запоминается в памяти и ЦПУ решает, нужны ему данные сообщения или нет (рис. 4). Контроллеры Basic CAN содержат один передающий буфер и один или два приемных буфера сообщений. Чтобы послать или получить сообщение, требуется задействовать ЦПУ через прерывания «сообщение_послано» и «сообщение_получено». В результате проверки каждого входящего сообщения загрузка ЦПУ очень велика, что ограничивает реальную скорость обмена по сети. По этой причине такие контроллеры используются в сетях CAN с низкой скоростью обмена и/или малым количеством сообщений.
Рис. 4. Структура контроллера Basic CAN
Большинство выпускаемых сегодня CAN-контроллеров используют расширенные кадры сообщений с идентификатором длиной 29 разрядов, что позволяет адресовать до 536 млн сообщений. Такие контроллеры соответствуют спецификации CAN V. 2.0B (active) и называются контроллеры Full-CAN. В них предусмотрен буфер для нескольких сообщений, причем каждое сообщение имеет свою маску, и фильтрация осуществляется по соответствию идентификатора маске.
В случае Full-CAN ЦПУ максимально разгружено, поскольку не обрабатывает ненужные сообщения (рис. 5). При приеме сообщения с идентификатором, соответствующим маске, оно запоминается в специальной зоне двухпортового ОЗУ, и работа ЦПУ прерывается. Full-CAN имеет также специальный тип сообщения, которое означает: «у кого бы ни находилась эта информация, пожалуйста, пошлите ее сейчас же». Контроллер Full-CAN автоматически прослушивает все сообщения и посылает запрошенную информацию.
Рис. 5. Структура контроллера Full-CAN
До недавнего времени в промышленности был широко распространен Basic CAN с 11-разрядным идентификатором. Этот протокол допускает простую связь между микроконтроллерами и периферийными устройствами при скорости обмена вплоть до 250 Кбит/с. Однако при стремительном удешевлении CAN-контроллеров использование Full-CAN стало оправданным и для связи с медленными устройствами. Если в промышленных приложениях требуется высокоскоростной (до 1 Мбит/с) обмен данными, то непременно следует использовать Full-CAN.
Микроконтроллеры с CAN-модулем
Одним из факторов, обеспечивших популярность CAN, является богатый выбор и доступная цена элементной базы различных производителей — Infineon, Motorola, Microchip, Philips и др.
В данной статье упор сделан на элементную базу Infineon. Такое решение основано, в частности, на результатах опроса, проводимого на сайте Keil Software (www.keil.com) для микроконтроллерных платформ 8051/251/С166. На вопрос, какой микроконтроллер со встроенным CAN вы используете, по выборке из 2111 респондентов ответы распределились согласно табл. 1.
Таблица 1. Результаты опроса: «Какой микроконтроллер со встроенным CAN вы используете?»
| Результат | Фирма | Тип микроконтроллера |
| 18% | Infineon | C505C/C515C |
| 28% | Infineon | C16x |
| 13% | Dallas | DS80C390 |
| 13% | Philips | 591/592/598 |
| 22% | Atmel/Temic | T89C51CC01 |
| 6% | ST Micro | ST10 |
Фирма Infineon выпускает продукты во всех классах цена/производительность. В настоящее время доступны как 8-разрядные контроллеры C505CA, C515C, так и 16-разрядные: C161CS, C164CI, C167CR, 167CS (табл. 2). Самым дешевым кристаллом с CAN является C505CA. МК C161CS и C167СS содержат два CAN-модуля. Самый мощный и дорогой микроконтроллер TriCore TC1775 также содержит реконфигурируемый модуль TwinCAN с двумя модулями CAN на 32 сообщения. TriCore — это первый 32-разрядный микроконтроллер Infineon с архитектурой DSP, оптимизированный для встроенных приложений реального времени, который заменяет собой МК, процессор DSP и заказную микросхему ASIC.Встроенный модуль соответствует спецификации CAN V2.0 B active и содержит память на 15 сообщений для приема/передачи с собственными идентификаторами, битами состояния и управления. Кроме того, он содержит регистры маски для фильтрации входящих сообщений и оснащен двумя приемными буферами. Встроенный модуль CAN позволяет строить системы с разнообразными задачами, используя минимальное количество микросхем внешнего интерфейса. Подключение любого из микроконтроллеров Infineon к CAN-шине осуществляется по одним и тем же принципам. Пример соединения C167CR с CAN-шиной представлен на рис. 7.
Таблица 2. CAN-микроконтроллеры фирмы Infineon
| Тип | Версия CAN | Кол-во сообщ. | CAN-модуль | Корпус | Примечание |
| С505СА | V2.0 B | 15 | 1 x CAN | MQFP-44 | 8 bit MC |
| С151С | V2.0 B | 15 | 1 x CAN | MQFP-80 | 8 bit MC |
| С161СS | V2.0 B | 30 | 2 x CAN | TQFP-128 | 16 bit MC |
| C164CI | V2.0 B | 15 | 1 x CAN | MQFP-80 | 16 bit MC |
| C167CR | V2.0 B | 15 | 1 x CAN | MQFP-144 | 16 bit MC |
| C167CS | V2.0 B | 30 | 2 x CAN | MQFP-144 | 16 bit MC |
| TC1775 | V2.0 B | 32 | TwinCAN | BGA-329 | 32 bit MC |
| SAE81C90 | V2.0 A | 16 | 1 x CAN | PLCC-44 | Stand Alone |
| SAE81C91 | V2.0 A | 16 | 1 x CAN | PLCC-28 | Stand Alone |
| SAK82C900 | V2.0 B | 32 | TwinCAN | P-DSO-28 | Stand Alone |
Кроме того, следует сказать также несколько слов о МК фирмы Philips — одного из родоначальников элементной базы CAN. На смену устаревшему автономному CAN-контроллеру Philips PCA82C200 пришел полностью совместимый с ним контроллер SJA1000, работающий со стандартом CAN V2.0 B. Необходимо отметить, что PCA82C200 поддерживает только стандарт CAN V2.0 A и способен передавать и принимать только стандартный CAN-протокол, то есть при приеме расширенного кадра он генерирует ошибку и может разрушить всю сеть. В SJA1000 за счет поддержки стандарта PeliCAN (чтение и запись счетчиков ошибок, программирование их количественного порога) значительно расширены возможности по управлению CAN.
Рис. 7. Пример соединения МК С167CR c CAN-шиной
В результате объединения SJA1000 с ядром XA появился 16-разрядный МК XAC3 с интегрированным CAN-интерфейсом
Совместимый с 8051 режим микроконтроллера Philips XA позволяет осуществить простой переход от 8-разрядной архитектуры 8051 к 16-разрядной, что особенно важно для сохранения преемственности программного обеспечения. Среди 8-разрядных МК следует отметить также Philips P80C592, P8xC591 и 8xCE598
Motorola тоже предлагает широкий спектр микроконтроллеров с интегрированным CAN-модулем: от самых дешевых 8-разрядных МК 68HC05X до 32-разрядного Power PC MPC555 с дуальным CAN V2.0 B.
Система передачи данных по шине CAN
Логические состояния шин и шифрование
Для обмена данными шина CAN использует два состояния «доминантное» и «рецессивное», с помощью которых передаются информационные биты. Доминантное состояние соответствует «0», а рецессивное — «1». Для шифрования передачи используется процесс NRZ (без возврата на ноль), в котором нулевое состояние не всегда возвращается в промежуток между двумя одинаковыми состояниями передачи и, соответственно, необходимый для синхронизации временной интервал между двумя фронтами может оказаться слишком большим.
В основном используется двухпроводной кабель, в зависимости от окружающих условий, с витой или не витой парой. Две шинные линии называются CAN-H и CAN-L (рис. «Уровень напряжения передачи по CAN» ).
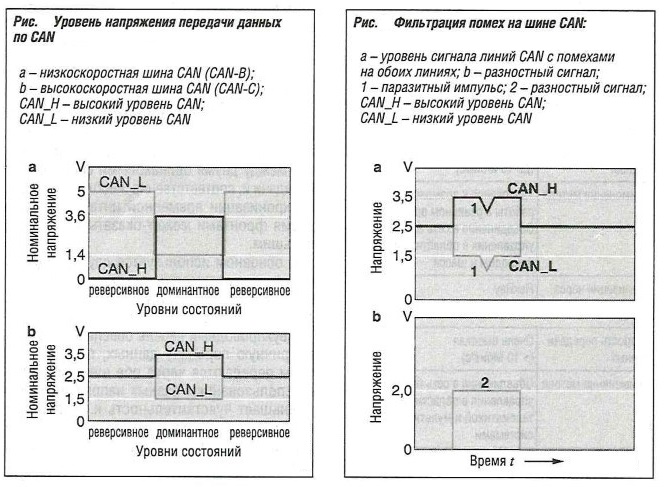
Двухпроводный кабель обеспечивает симметричную передачу данных, при которой биты передаются через обе шинные линии с использованием разных напряжений. Это уменьшает чувствительность к синфазным помехам, поскольку помехи влияют на обе линии и могут быть отфильтрованы путем создания разности (рис. «Фильтрация помех по шине CAN» ).
Однопроводный кабель представляет собой способ сокращения производственных затрат за счет экономии на втором кабеле. Однако общее подключение к массе, выполняющей функцию второго кабеля, должно быть доступно для этой цели всем пользователям шины. Поэтому однопроводный вариант шины CAN возможен только для системы связи с ограниченным монтажным пространством. Передача данных по однопроводному кабелю более чувствительна к излучаемым помехам — он не позволяет фильтровать импульсы помех так, как в двухпроводном кабеле. В результате на шинной линии требуется сигнал более высокого уровня. Это, в свою очередь, отрицательно сказывается на излучении помех. Поэтому необходимо снизить крутизну фронта импульсов сигналов шины по сравнению с двухпроводным кабелем. Это связано с уменьшением скорости передачи данных. По этой причине однопроводной кабель используется только для низкоскоростной шины CAN в области кузова и электроники для функций комфорта. Например, низкоскоростная шина CAN с двухпроводным кабелем в случае обрыва кабеля должна продолжать работать как однопроводная система. Однопроводное решение не описывается в спецификации CAN.
Уровни напряжения шины CAN
Высокоскоростные и низкоскоростные шины CAN используют разные уровни напряжения для передачи доминантных и рецессивных состояний. Уровни напряжения низкоскоростной шины CAN показаны на рис. а, «Уровень напряжения передачи по CAN», а высокоскоростной — на рис. Ь, «Уровень напряжения передачи по CAN».
Высокоскоростная шина CAN в рецессивном состоянии на обеих линиях использует номинальное напряжение 2,5 В. В доминантном состоянии на CAN-H и CAN-L подается номинальное напряжение 3,5 В и 1,5 В, соответственно. В низкоскоростной шине CAN в рецессивном состоянии на CAN-H подается напряжение 0 В (максимум 0,3 В), на CAN-L — 5 В (минимум 4,7 В). В доминантном состоянии на CAN-H напряжение составляет не менее 3,6 В, а на CAN-L не более 1,4 В.
Предельные значения
Для арбитражного метода в случае CAN важно, чтобы все узлы в сети видели биты идентификатора фрейма одновременно, чтобы узел, передавая бит, видел, передают ли их другие узлы. Задержки возникают из-за распространения сигнала в шине данных и обработки в трансивере
Таким образом, максимально допустимая скорость передачи данных зависит от общей длины шины. Стандарт ISO предусматривает скорость 1 Мбит/с для 40 м. У более длинных проводов возможная скорость передачи данных примерно обратно пропорциональна длине провода. Сети с дальностью 1 км могут работать со скоростью 40 кбит/с.
Инструкция по подключению сигнализации по CAN-шине
При монтаже противоугонной системы простой вариант ее соединения с бортовой сетью — связать охранную установку с цифровым интерфейсом. Но такой метод возможен при наличии КАН-шины в автомобиле.
Чтобы произвести установку автосигнализации и подключить ее к CAN-интерфейсу, необходимо знать место монтажа блока управления системой.
Если сигналку ставили специалисты, то надо обратиться за помощью с этим вопросом на СТО. Обычно устройство располагается за приборной панелью автомобиля или под ней. Иногда установщики ставят микропроцессорный модуль в свободное пространство за бардачком или автомагнитолой.
Для выполнения задачи потребуется:
- мультиметр;
- канцелярский нож;
- изолента;
- отвертка.
Пошаговые действия
Процедура подключения противоугонной установки к CAN-шине осуществляется так:
- Сначала надо убедиться, что все элементы охранного комплекса установлены и работают. Речь идет о микропроцессорном блоке, антенном модуле, сервисной кнопке, сирене, а также концевых переключателях. Если сигнализация имеет опцию автозапуска, надо убедиться в правильности монтажа этого устройства. Все элементы противоугонной установки подключаются к микропроцессорному блоку.
- Выполняется поиск основного проводника, идущего к CAN-шине. Он более толстый и его изоляция обычно окрашена в оранжевый цвет.
- Основной блок автосигнализации соединяется с данным контактом. Для выполнения задачи используется разъем цифрового интерфейса.
- Производится монтаж блока управления охранной системы, если он не был установлен. Его следует разместить в сухом и недоступном для посторонних глаз месте. После монтажа устройство надо качественно зафиксировать, иначе в процессе движения на него будут оказывать негативное воздействие вибрации. В результате это приведет к быстрой поломке модуля.
- Место соединения проводников тщательно изолируется, допускается использование термоусадочных трубок. Рекомендуется дополнительно обмотать изолентой провода. Это позволит увеличить их ресурс эксплуатации и не допустить стирания изоляционного слоя. Когда подключение будет выполнено, осуществляется проверка. Если возникли проблемы в передачи пакетных данных, с помощью мультиметра следует произвести диагностику целостности электроцепей.
- На завершающем этапе выполняется настройка всех каналов связи, в том числе дополнительных, если они имеются. Это позволит обеспечить бесперебойную работу охранной системы. Для настройки используется сервисная книжка, входящая в комплектацию противоугонной установки.
Пользователь Sigmax69 рассказал о соединении охранного комплекса с цифровым интерфейсом на примере автомобиля Хендай Солярис 2017.
Что такое CAN-шина
Электронный КАН-интерфейс в авто представляет собой сеть контроллеров, использующихся для объединения всех управляющих модулей в единую систему.
Данный интерфейс представляет собой колодку, с которой можно соединять посредством проводов блоки:
- противоугонного комплекса, оборудованного функцией автозапуска либо без нее;
- системы управления мотором машины;
- антиблокировочного узла;
- системы безопасности, в частности, подушек;
- управления автоматической коробкой передач;
- контрольного щитка и т. д.
Устройство и где находится шина
Конструктивно CAN-шина представляет собой блок, выполненный в пластиковом корпусе, либо разъем для подсоединения кабелей. Цифровой интерфейс состоит из нескольких проводников, которые называются CAN. Для подключения блоков и устройств используется один кабель.
Место монтажа устройства зависит от модели транспортного средства. Обычно этот нюанс указывается в сервисном руководстве. СAN-шина устанавливается в салоне автомобиля, под контрольным щитком, иногда может располагаться в подкапотном пространстве.
Как работает?
Принцип работы автоматической системы заключается в передаче закодированных сообщений. В каждом из них имеется специальный идентификатор, являющийся уникальным. К примеру, «температура силового агрегата составляет 100 градусов» или «скорость движения машины 60 км/ч». При передаче сообщений все электронные модули будут получать соответствующую информацию, которая проверяется идентификаторами. Когда данные, передающиеся между устройствами, имеют отношение к конкретному блоку, то они обрабатываются, если нет — игнорируются.
Длина идентификатора CAN-шины может составить 11 либо 29 бит.
Каждый передатчик информации одновременно выполняет считывание данных, передающихся в интерфейс. Устройство с более низким приоритетом должно отпустить шину, поскольку доминантный уровень с высоким показателем искажает его передачу. Одновременно пакет с повышенным значением остается нетронутым. Передатчик, который потерял связь, спустя определенное время ее восстанавливает.
Интерфейс, подключенный к сигналке или модулю автоматического запуска, может функционировать в разных режимах:
- Фоновый, который называется спящим или автономным. Когда он запущен, все основные системы машины отключены. Но при этом на цифровой интерфейс поступает питание от электросети. Величина напряжения минимальная, что позволяет предотвратить разряд аккумуляторной батареи.
- Режим запуска или пробуждения. Он начинает функционировать, когда водитель вставляет ключ в замок и проворачивает его для активации зажигания. Если машина оборудована кнопкой Старт/Стоп, это происходит при ее нажатии. Выполняется активация опции стабилизации напряжения. Питание подается на контроллеры и датчики.
- Активный. При активации этого режима процедура обмена данными осуществляется между регуляторами и исполнительными устройствами. Параметр напряжения в цепи увеличивается, поскольку интерфейс может потреблять до 85 мА тока.
- Деактивация или засыпание. Когда силовой агрегат останавливается, все системы и узлы, подключенные к шине CAN, перестают функционировать. Выполняется их деактивация от электрической сети транспортного средства.
Характеристики
Технические свойства цифрового интерфейса:
- общее значение скорости передачи информации составляет около 1 Мб/с;
- при отправке данных между блоками управления различными системами этот показатель уменьшается до 500 кб/с;
- скорость передачи информации в интерфейсе типа «Комфорт» — всегда 100 кб/с.
Канал «Электротехника и электроника для программистов» рассказал о принципе отправки пакетных данных, а также о характеристиках цифровых адаптеров.